DC motor= egyenáramú motor, villanymotor
A villanymotor egy motorként működő villamos forgógép, amely az elektromágneses indukció elvén alapuló eszköz, az elektromos áram energiáját mechanikus energiává, forgó mozgássá alakítja.
Ha egy mágneses térben elhelyezett tekercsbe elektromos áramot vezetnek a benne kialakuló mágneses mező
kölcsönhatásba lép az állandó mágnesek közötti mágneses mezővel és elfordítja a tekercset (a motor forgórészét).


Stepper motor, léptetőmotor
A léptetőmotorok lényeges tulajdonsága, hogy egy körülforduláshoz hány lépés szükséges. Ezt megadhatják
fokban, ekkor az egy lépésre eső szögelfordulást adják meg. Illetve megadhatják az egy körülforduláshoz szükséges lépésszámot. Természetesen fontos paraméter a motor terhelhetősége, teljesítménye és nyomatéka is. A léptetőmotort digitális jellel kell vezérelni. Ennek a motortípusnak hatalmas előnye, hogy a jel hatására adott, előre meghatározott pozícióba fordul. Elsősorban olyan helyeken alkalmazzák e motorokat, ahol amúgy is digitális jelekkel dolgoznak, illetve ahol lényeges a pontos pozícióba állás. Tehát megtalálhatók a számítógép perifériákban (nyomtató, floppy, winchester, scanner, CD-rom), az ipari termelés sok területén, valamint a modellezésben.
.png)

Servo motor, szervó motor
Két irányba mozgatható, vezérléssel működik, programozni kell. A szervók impulzusszélesség vezérelt motorok. Ez gyakorlatilag azt jelenti, hogy a motornak egy impulzus szélességgel lehet megadni, hogy milyen pozícióba álljon. A motor vezérlőjének első része egy impulzusszélesség ->feszültség konverter. Ez megméri a kapott impulzus szélességét, majd annak alapján egy adott feszültséget generál. A vezérlőbe be van égetve a minimum impulzus szélesség (minIW) és a maximum impulzus szélesség (maxIW). A generált feszültség maximális értéke közel megegyezik a bejövő tápfeszültséggel. Ezt a maxIW elérésekor adja ki magából. A motor nem ezzel a feszültséggel lesz meghajtva. Ez csak egy referencia feszültség. A szervó tengelyén egy potmétert helyeztek el. Ahogy fordul a tengely, úgy változik ellenállása. A poti egyik vége V+ a másik pedig GND-re van kötve. A középső lábán pedig egy referencia feszültséget kapunk. Na most már van 2 referencia feszültségünk. Az egyik referencia feszültésg a motor aktuális pozícióját jelzi, a másik pedig a jövőbeni pozícióját. A cél, hogy a két referencia feszültség egyenlő nagyságú legyen, tehát a motor elérje a kívánt pozíciót. Ehhez ez a két feszültség rá van engedve egy harmadik egységre, ami összehasonlítja a két feszültséget. Ez a harmadik egység képes a feszültségkülönbségek alapján meghatározni, hogy a motort jobbra vagy balra kell forgatni ahhoz, hogy a két referenciafeszültség egyforma legyen. A referencia összehasonlító közvetlenül vezérel egy H-hidat ami a motornak szükséges áramot adja.

Mi a H-hid?
A H-hid egy olyan áramkör, ami lehetővé teszi hogy a feszültséget minkét irányba alkalmazhassuk, robottechnikában gyakran alkalmazzák DC motorokhoz hogy előre és hátrafelé is lehessen forgatni. Integrált áramkör formájában is elérhetőek, de külön alkatrészekből is összeszerelhetőek.
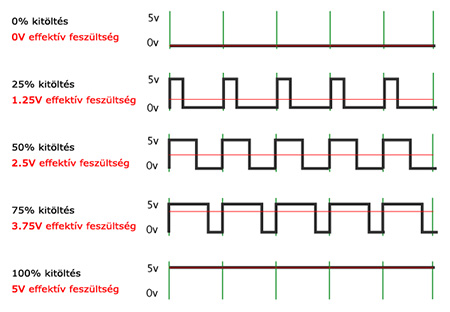
Mi az a PWM?
A PWM (pulse-width moderation) impulzus szélesség modulációs eljárás igen elterjedt a vezérléstechnikában. Lényege, hogy mikrovezérlő vagy más elektronikai eszköz segítségével modulált jelet hozunk létre és a tekercset ezzel a jellel gerjesztjük, nem pedig egyenárammal. A PWM jellemzői az alapfrekvencia és a kitöltési tényező. Az alapfrekvencia meghatározza, hogy a modulált jel hányszor változik másodpercenként. Bevett szokás, hogy az alapfrekvenciát 20KHz felettire választják, mert ez a frekvencia az emberi fül számára már nem hallható. A kitöltési tényező azt határozza meg, hogy egy perióduson belül a négyszögjel a teljes periódusidő hány százalékában vesz fel logikai 1-es értéket.
LINKEK:
-villanymotor http://hu.wikipedia.org/wiki/Villanymotor
-elektromágnesesség http://hu.wikipedia.org/wiki/Elektrom%C3%A1gness%C3%A9g
-léptető motor http://qtp.hu/elektro/leptetomotor_mukodese.php
http://en.wikipedia.org/wiki/Stepper_motor
-léptető motor és PWM: http://www.hun.cncdrive.com/tudasbazis/stp.htm
-szervó motor, servo motor: http://www.seattlerobotics.org/guide/servos.html
http://en.wikipedia.org/wiki/Servo_motor#RC_servos
-szervó motor vezérlése http://myprojects.hu/pic/szervo-motorok-vezerlese.html
-H-hid http://www.hobbielektronika.hu/kapcsolasok/h-hid_avagy_egyszeru_motorvezerles.html?pg=1
http://en.wikipedia.org/wiki/H-bridge