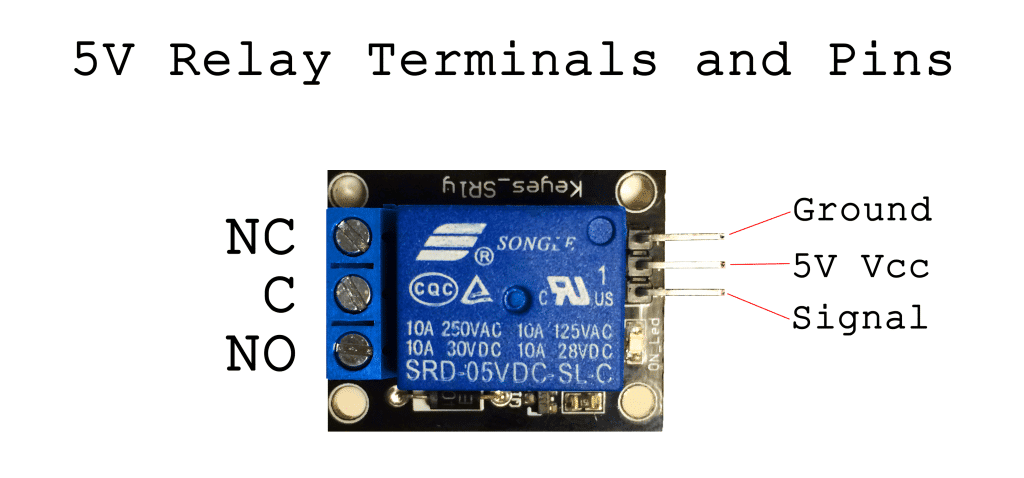
Az SRD-05VDC-SL-C relé három nagyfeszültségű csatlakozóval rendelkezik (NC, C és NO), amelyek a vezérelni kívánt eszközhöz csatlakoznak. A másik oldalon három alacsony feszültségű csap van (Ground, Vcc és Signal), amelyek az Arduino-hoz csatlakoznak.
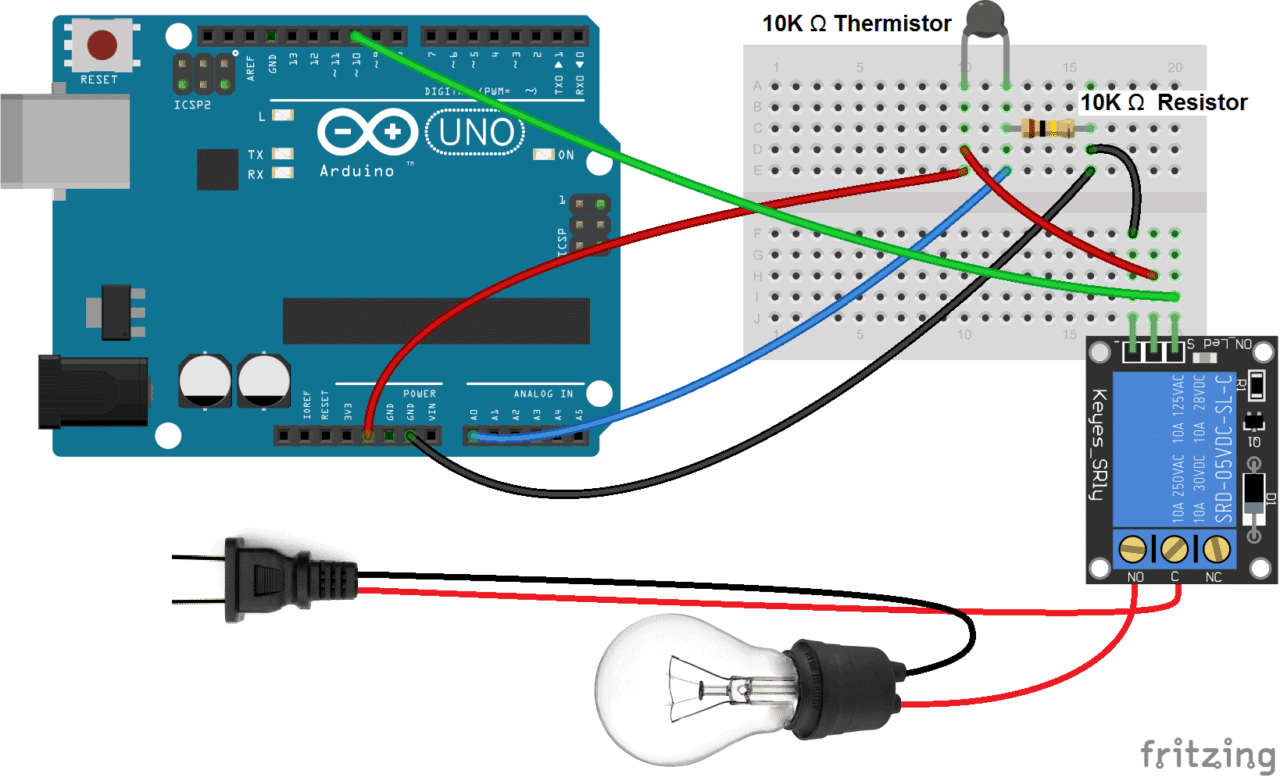
Hogy megmutassuk, hogyan kell a relét bekötni, építsünk egy hőmérséklet-vezérelt reléáramkört, amely kikapcsol egy izzót, amikor egy termisztor hőmérséklete eléri a 150 °F-ot. A termisztorok nagyon hasznosak az 5V-os relékkel. Használhatja őket egy nagy motor kikapcsolására, ha túl meleg lesz, vagy bekapcsolhat egy fűtőtestet, ha a hőmérséklet túl hideg lesz.
FIGYELMEZTETÉS - EZ A PROJEKT MAGAS FESZÜLTSÉGET TARTALMAZ, AMELY SÚLYOS SÉRÜLÉST VAGY HALÁLT OKOZHAT. KÉRJÜK, TEGYEN MEG MINDEN SZÜKSÉGES ÓVINTÉZKEDÉST, ÉS KAPCSOLJA KI AZ ÁRAMKÖR MINDEN ÁRAMÁT, MIELŐTT DOLGOZNA RAJTA.
Ebben a példában a relé mindaddig aktiválva marad, és áramot enged az izzón keresztül, amíg a termisztor hőmérséklete el nem éri a 150°F-ot. 150°F-nál a relé kikapcsol, és az áram leáll.
NC: Normál esetben zárt 120-240V-os csatlakozó
NO: Normál esetben nyitott 120-240V csatlakozó
C: közös kapocs
Földelés: Csatlakozik az Arduino földelőtüskéjéhez.
5V Vcc: Az Arduino 5V-os csatlakozója.
Jel: Az Arduinótól érkező, a relét aktiváló trigger jelet hordozza.
A relé belsejében egy 120-240V-os kapcsoló van, amely egy elektromágneshez van csatlakoztatva. Amikor a relé HIGH jelet kap a jelcsapon, az elektromágnes feltöltődik, és a kapcsoló érintkezőit kinyitja vagy bezárja.
Normálisan nyitott vs. Normálisan zárt
A relében két különböző típusú elektromos érintkező található - normál esetben nyitott (NO) és normál esetben zárt (NC). Az, hogy melyiket használja, attól függ, hogy az 5 V-os jelet a kapcsoló bekapcsolására vagy kikapcsolására szeretné-e használni. A 120-240V-os tápfeszültség mindkét konfigurációban a közös (C) csatlakozónál lép be a relébe. A normál esetben nyitott érintkezők használatához használja a NO csatlakozót. A normál esetben zárt érintkezők használatához használja az NC csatlakozót.
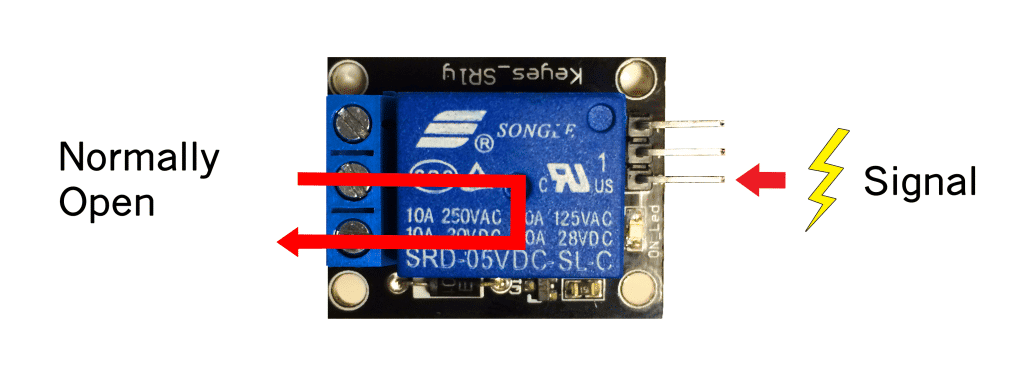
Normál esetben nyitott
5V-os relé Normál esetben nyitott terminál
A normál nyitott konfigurációban, amikor a relé HIGH jelet kap, a 120-240V-os kapcsoló bezáródik, és lehetővé teszi az áram áram áramlását a C terminálról a NO terminálra. A LOW jel kikapcsolja a relét és leállítja az áramot. Tehát ha azt szeretné, hogy a HIGH jel bekapcsolja a relét, használja a normál nyitott terminált:
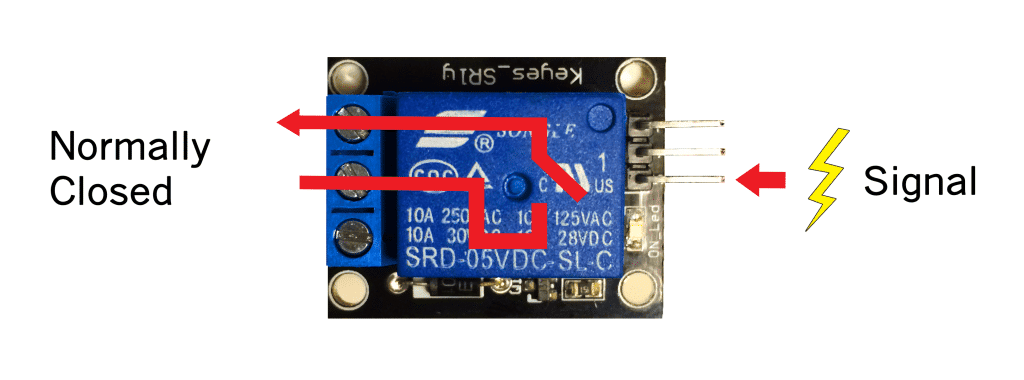
Normálisan zárt
A normál zárt konfigurációban a HIGH jel kinyitja a kapcsolót és megszakítja a 120-240V-os áramot. A LOW jel bezárja a kapcsolót, és lehetővé teszi az áram áram áramlását a C terminálról az NC terminálra. Ezért, ha azt szeretné, hogy a HIGH jel kikapcsolja a 120-240V-os áramot, használja a normál zárt csatlakozót:
ARDUINO KÓD
#include <math.h>
int pinOut = 10;
double Thermistor(int RawADC) {
double Temp;
Temp = log(10000.0*((1024.0/RawADC-1)));
Temp = 1 / (0.001129148 + (0.000234125 + (0.0000000876741 * Temp * Temp ))* Temp );
Temp = Temp - 273.15;
Temp = (Temp * 9.0)/ 5.0 + 32.0;
return Temp;
}
void setup() {
Serial.begin(9600);
pinMode(10, OUTPUT);
}
void loop() {
int val;
double temp;
val=analogRead(0);
temp=Thermistor(val);
Serial.print("Temperature = ");
Serial.print(temp);
Serial.println(" F");
if (temp >= 150){
digitalWrite(pinOut, LOW);
}
else {
digitalWrite(pinOut, HIGH);
}
delay(500);
}
forrás:
https://www.circuitbasics.com/setting-up-a-5v-relay-on-the-arduino/