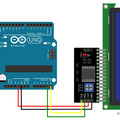
Kell egy 10KOhm-os ellenállás, egy kétállású SPDT kapcsoló (on-on), 1 DC motor (3V elég, az arduino csak 5V-ot bír meghajtani) és h-híd. A h-hídnak mindkét oldalát be kell kötni a feszültségbe és a földelésbe is, de csak azt az oldalát kell bekapcsolni amelyiket használod. (EN lábra kell HIGH jelet küldeni.)
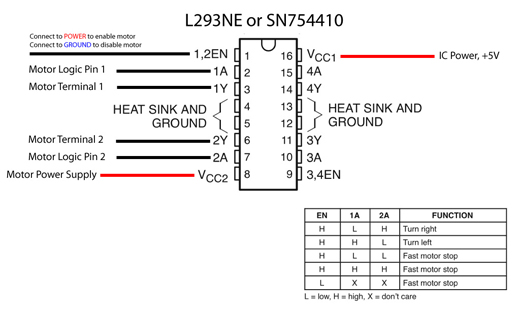
A H-híd lábainak kiosztása:
Összeépítés próbapanelen, egy motorral, de egyenlőre a 9V elemet ne kössük rá, mert az USB kábel is elég ahhoz hogy forogjon egy 3V-os motor, a kondenzárot is lehagyható.
(1).jpg)
Kód:
const int switchPin = 2; // kapcsoló bemenete const int motor1Pin = 3; // H-híd 1. lába const int motor2Pin = 4; // H-híd 2. lába const int enablePin = 9; // H-híd engedélyezése pin const int ledPin = 13; // LED void setup() { // a kapcsoló pint bemenetként használjuk: pinMode(switchPin, INPUT); // a többit kimenetként: pinMode(motor1Pin, OUTPUT); pinMode(motor2Pin, OUTPUT); pinMode(enablePin, OUTPUT); pinMode(ledPin, OUTPUT); //engedélyezni kell a H-hidat hogy működjön, azaz be kell kapcsolni digitalWrite(enablePin, HIGH); // 3x felvillan a LED. Ez egyszer történik meg. // a többszöri villanás hibát jelez, pl. a motor kiégett blink(ledPin, 3, 100); } void loop() { // ha a kapcsoló be van kapcsolva, akkor ez egyik irányba forog a motor if (digitalRead(switchPin) == HIGH) { digitalWrite(motor1Pin, LOW); // a H-híd 1. lábát kikapcsolja digitalWrite(motor2Pin, HIGH); // a H-híd 2. lábát bekapcsolja } // ha ki van kapcsolva, akkor a másik irányba: else { digitalWrite(motor1Pin, HIGH); // a H-híd 1. lábát bekapcsolja digitalWrite(motor2Pin, LOW); // a H-híd 2. lábát kikapcsolja } } /* LED villogtatása */ void blink(int whatPin, int howManyTimes, int milliSecs) { int i = 0; for ( i = 0; i < howManyTimes; i++) { digitalWrite(whatPin, HIGH); delay(milliSecs/2); digitalWrite(whatPin, LOW); delay(milliSecs/2); }
}
http://itp.nyu.edu/physcomp/Labs/DCMotorControl
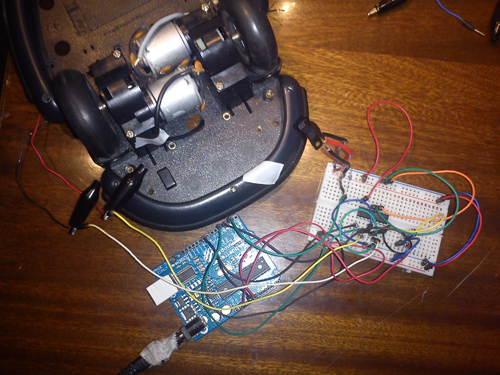
SN754410 chippel (by Omer Wibke)
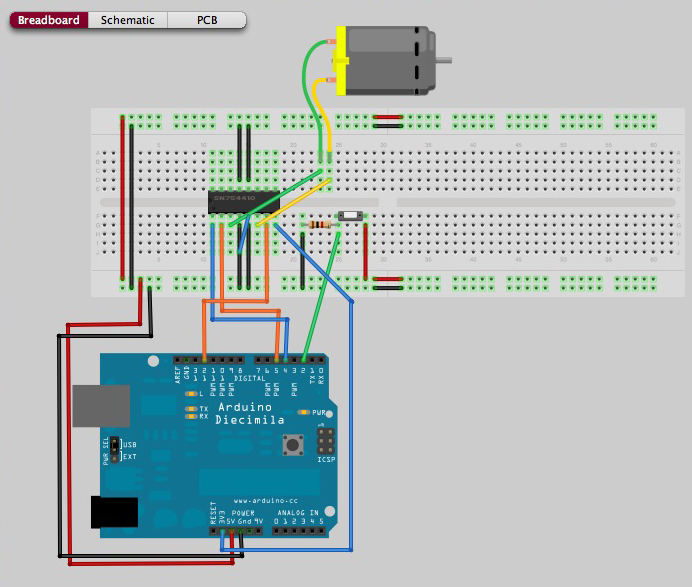
forrás: http://fritzing.org/projects/dc-motor-control/
Fritzing (arduino szimulátor) file-t is le lehet innen tölteni hozzá.
kód:
int switchPin = 2; // switch input
int motor1Pin = 4; // H-bridge leg 1 (pin 2, 1A)
int motor2Pin = 5; // H-bridge leg 2 (pin 7, 2A)
int enablePin = 12; // H-bridge enable pin
int ledPin = 13; // LED
void setup() {
// set the switch as an input:
pinMode(switchPin, INPUT);
// set all the other pins you're using as outputs:
pinMode(motor1Pin, OUTPUT);
pinMode(motor2Pin, OUTPUT);
pinMode(enablePin, OUTPUT);
pinMode(ledPin, OUTPUT);
// set enablePin high so that motor can turn on:
digitalWrite(enablePin, HIGH);
// blink the LED 3 times. This should happen only once.
// if you see the LED blink three times, it means that the module
// reset itself,. probably because the motor caused a brownout
// or a short.
blink(ledPin, 3, 100);
}
void loop() {
// if the switch is high, motor will turn on one direction:
if (digitalRead(switchPin) == HIGH) {
digitalWrite(motor1Pin, LOW); // set leg 1 of the H-bridge low
digitalWrite(motor2Pin, HIGH); // set leg 2 of the H-bridge high
}
// if the switch is low, motor will turn in the other direction:
else {
digitalWrite(motor1Pin, HIGH); // set leg 1 of the H-bridge high
digitalWrite(motor2Pin, LOW); // set leg 2 of the H-bridge low
}
}
/*
blinks an LED
*/
void blink(int whatPin, int howManyTimes, int milliSecs) {
int i = 0;
for ( i = 0; i < howManyTimes; i++) {
digitalWrite(whatPin, HIGH);
delay(milliSecs/2);
digitalWrite(whatPin, LOW);
delay(milliSecs/2);
}
}

Plusz találtam egy blogot, ahol L293Dne h-híddal vezérel Miklós egy motort: http://www.miklos.blog.br/2009/11/controlar-motores-dc-com-l293d.html